Mercury: Transforming Ground-Air Drone
Founded a startup to engineer a multimodal delivery vehicle. Developed custom transition flight logic to manage the aerodynamic shift between street-driving and autonomous flight. Managed full-stack hardware: from airframe CAD to high-reliability PCB architecture.
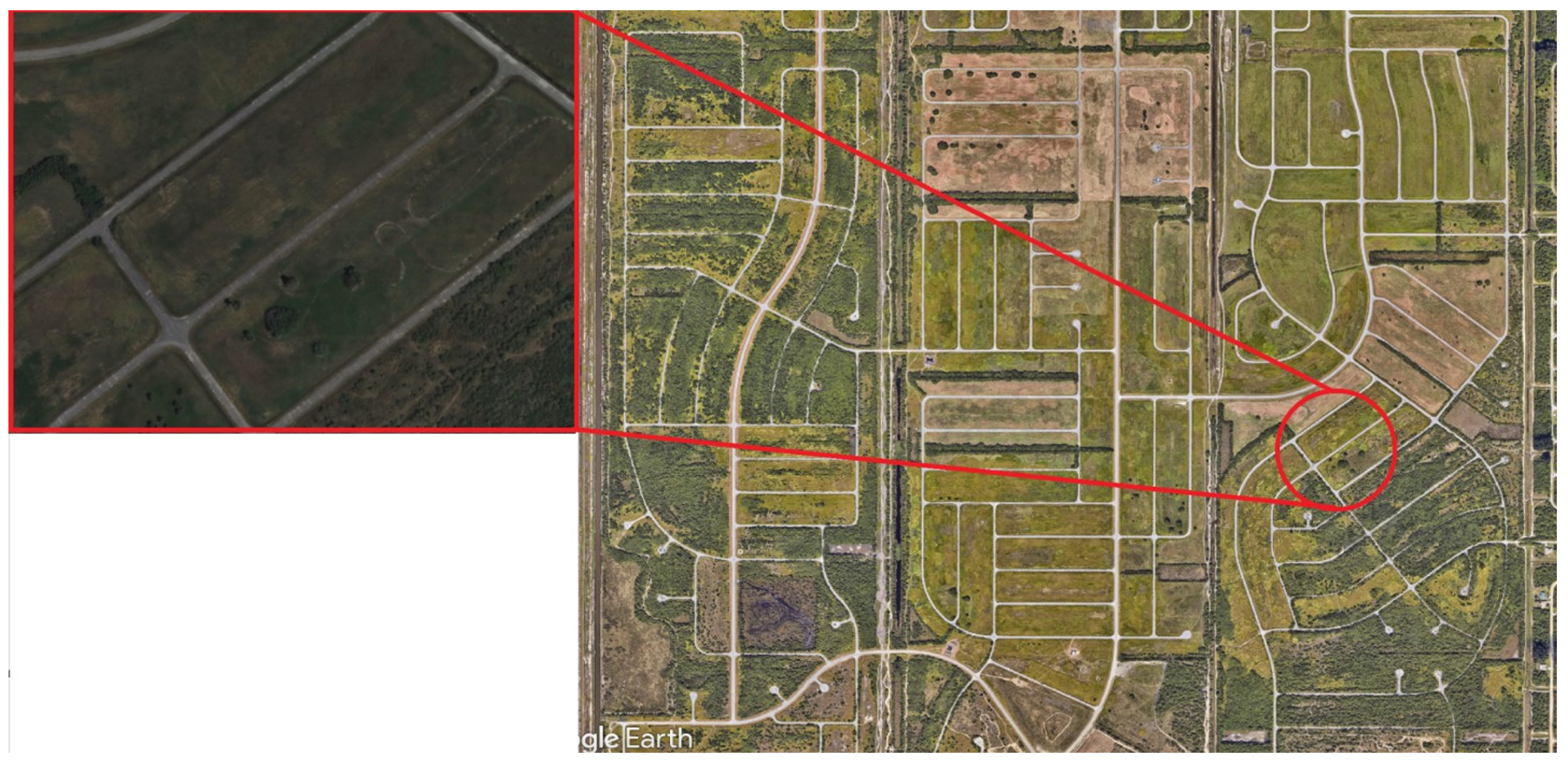
Computer Vision-Based UAV Localization
Engineered a robust CV algorithm allowing a UAV to infer global coordinates without GPS. Utilizing visual feature tracking and terrain matching, achieved 80% localization accuracy in simulated environments—critical for mission-resilient autonomous flight in GPS-denied zones.
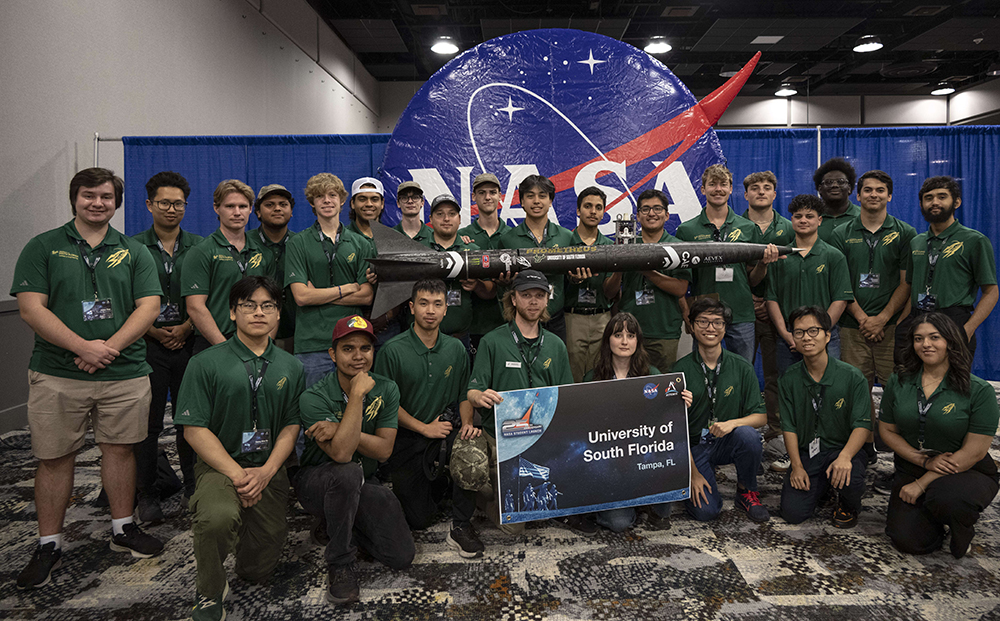
NASA Student Launch 2025
Led 20+ computer, electrical, and mechanical engineers. Developed a high-power rocket with active airbrakes. Spearheaded a Digital Twin software suite to validate airbrake control laws, earning the university's first NASA award in 8 years.
Odyseus: Spatial Intelligence SDK
A hardware-agnostic API for advanced robot autonomy. Implemented state-of-the-art monocular depth estimation, Bayesian statistical filtering for sensor noise, and Theta* path planning. Enables cheap sensors to perform advanced SLAM and obstacle avoidance.
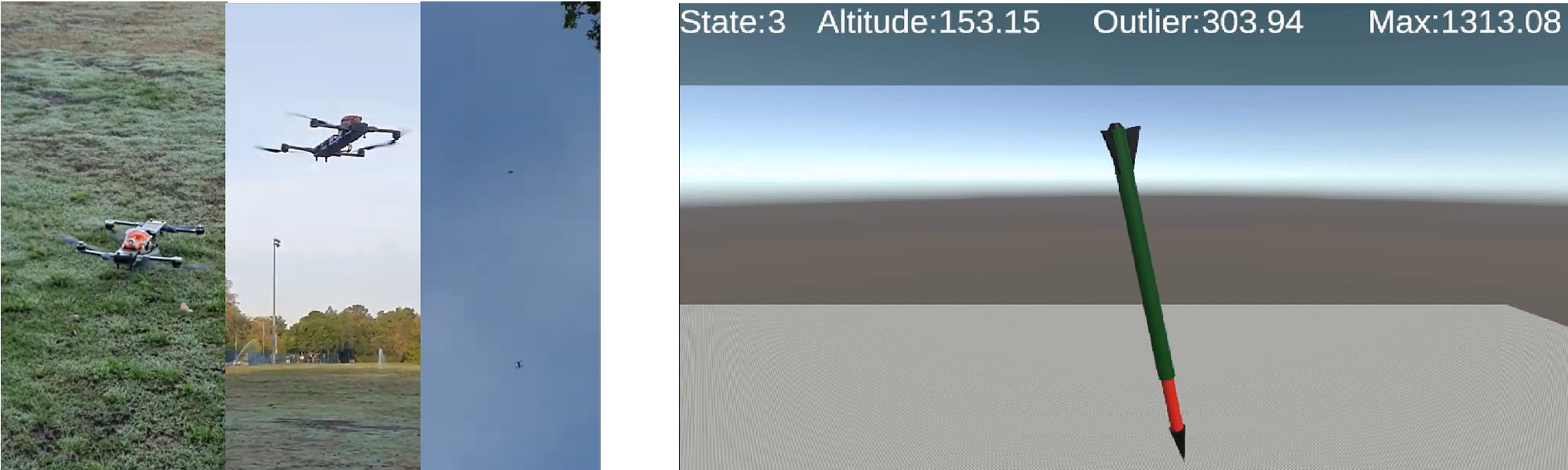
Rocket-Deployable UAV
Designed a drone system capable of surviving and deploying from a rocket payload at 400ft. Developed high-reliability embedded firmware for recovery and LoRa-based telemetry. Used Hardware-in-the-Loop (HIL) testing for mission validation.
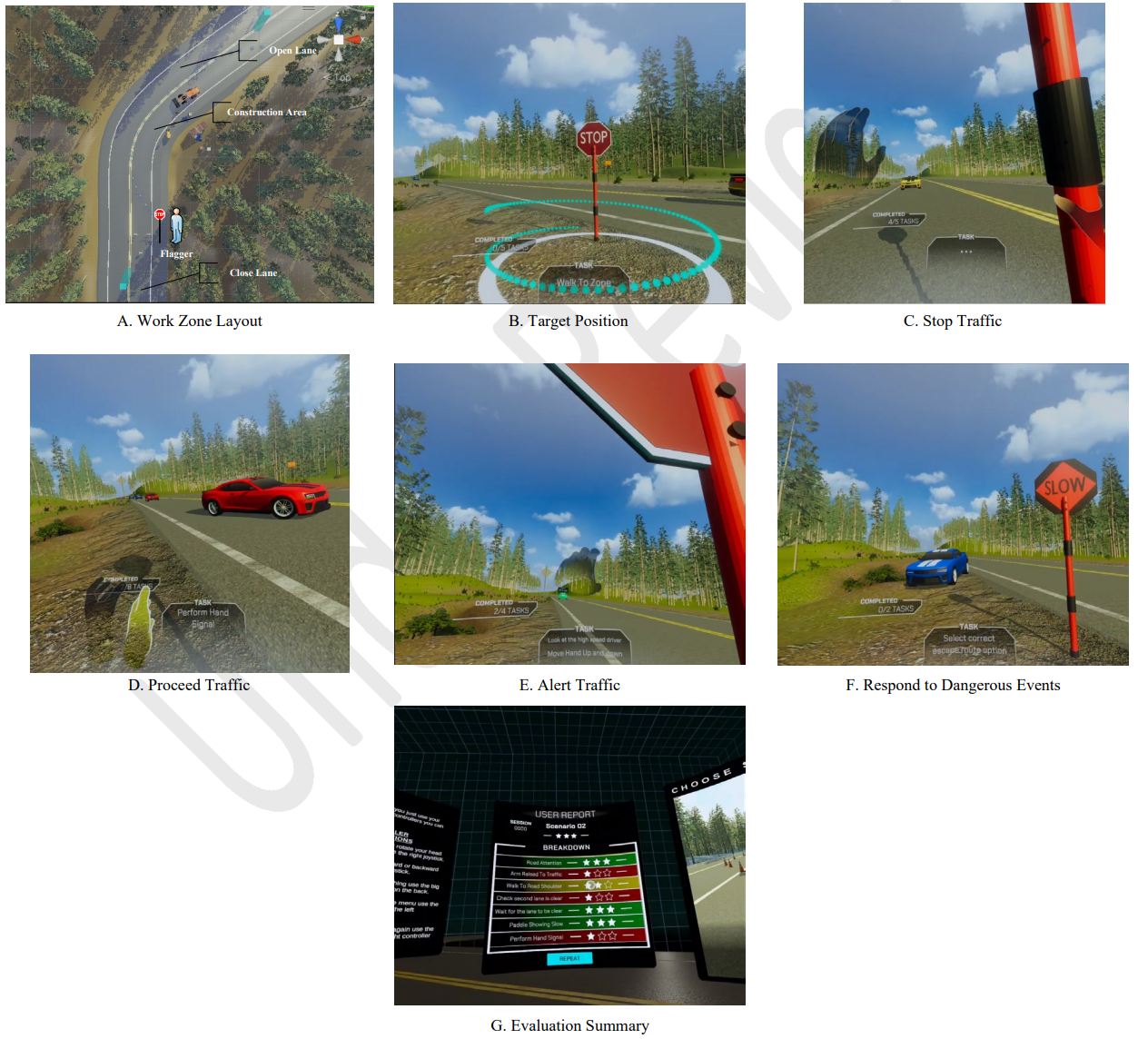
VR Training Simulation Research
Software Developer for a published research paper on roadside construction worker training. Built a high-fidelity VR simulation (VR4VR) to study safety behavior in high-risk environments, focusing on realistic physics and human-factors engineering.
Feynman Lock (Biometric Security)
A field-tested biometric lock system featuring custom-designed PCBs, SPI-based communication with fingerprint sensors, and low-power firmware. Developed as a high-security replacement for standard dorm locks, serving as a reliable entry system for 2 years.
Ratbird
An experimental flight testbed and dual-mode hybrid drone used for verifying custom flight control algorithms. Developed as a rapid prototyping platform to validate sensor fusion reliability and flight envelope expansion.
Technical Engineering Portfolio
 Unity // Flask
Unity // Flask
SOAR Exosky
Award-winning app to display the night sky from any exoplanet. 1st Place in local NASA Competition.
View Repo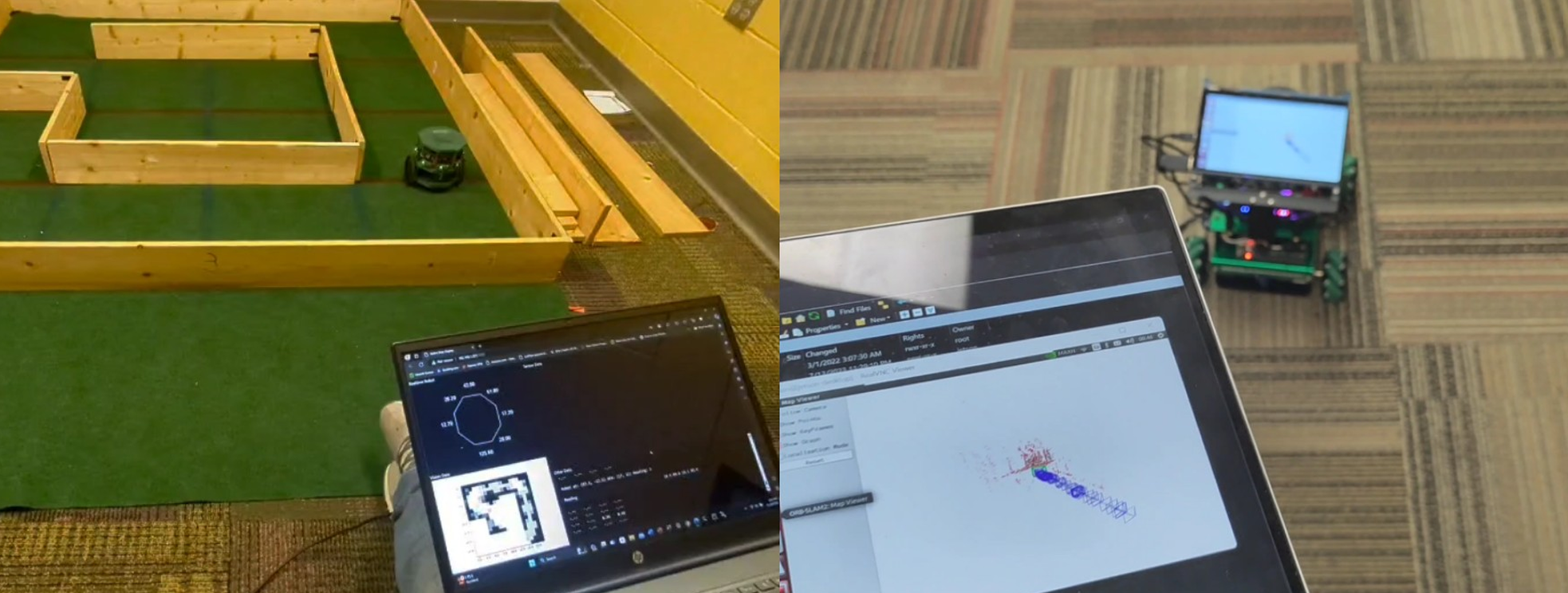 ROS2 // Lidar
ROS2 // Lidar
SLAM Mobile Robots
Implemented Particle Filters and GraphSLAM on physical mobile platforms for autonomous mapping research.
View Repo EEG // Unity // C#
EEG // Unity // C#
Brain Controlled Dino
Integrated a Brain-Computer Interface with motor imagery to control digital environments via EEG signals.
View Repo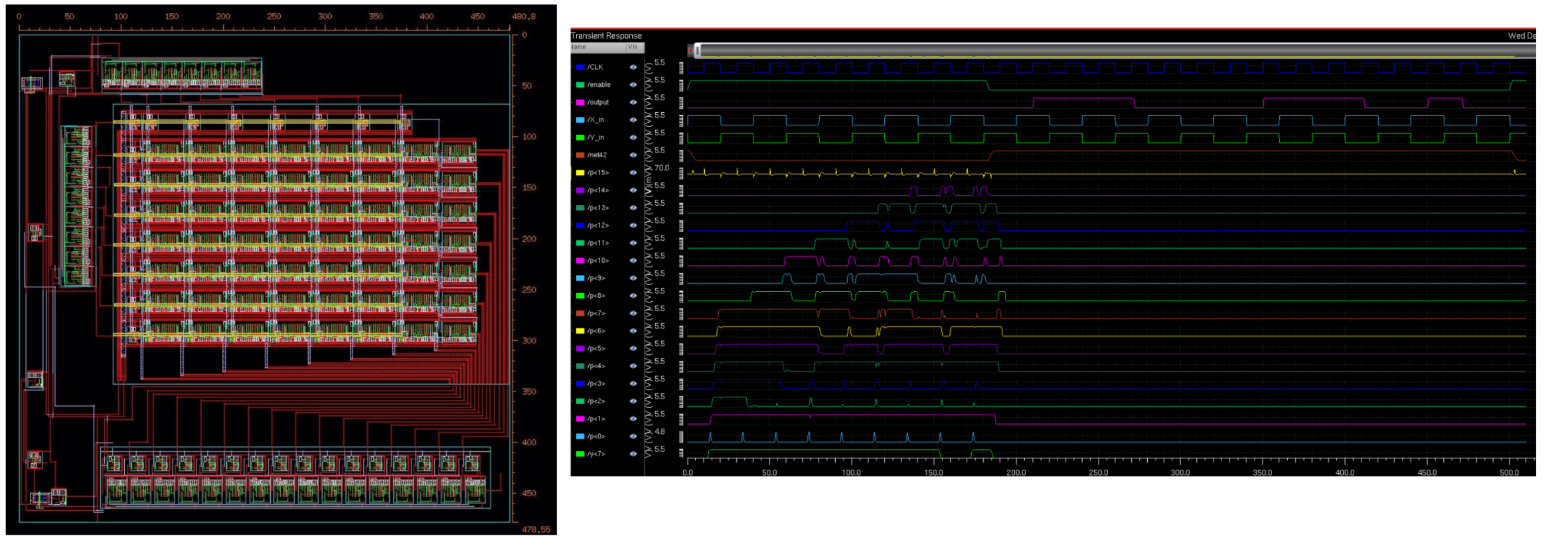 CMOS VLSI
CMOS VLSI
ASIC 16-bit Multiplier
Designed silicon-level logic for high-speed multiplication, running at 69MHz within 500x500 micrometers.
 Edge AI // ESP32
Edge AI // ESP32
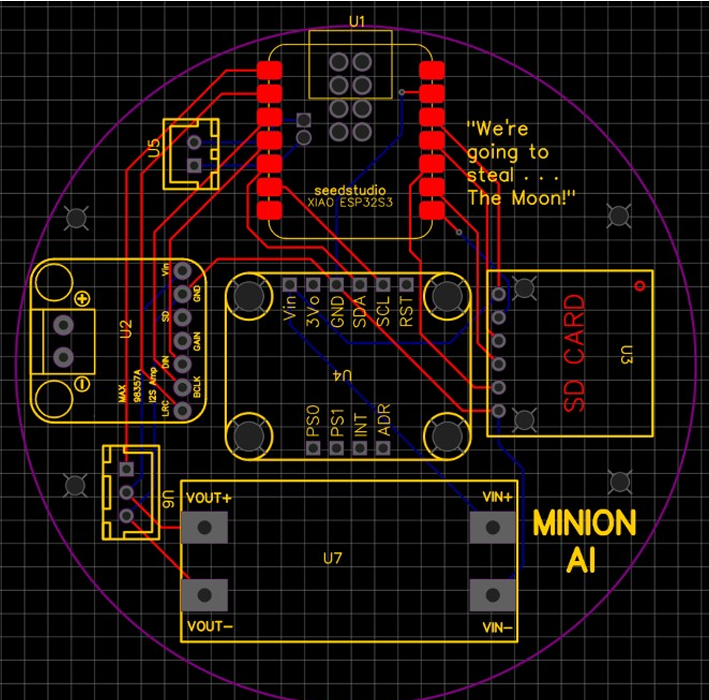
Interactive AI Character
Designed a custom circuit board to run on-device CNN image classification in under 1 second.